
Besoin d'aide pour choisir le bon produit ?
Notre outil vous permettra de trouver le produit le mieux adapté à vos besoins.
Accéder au sélecteur de produitsBienvenue sur le site French
Nous avons détecté que vous préférez peut-être le site Global. Veuillez utiliser le menu déroulant ci-dessus pour modifier votre sélection si nécessaire.
Les régulateurs Eurotherm pilotent automatiquement les variables de process telles que la température, l’humidité, la pression, le débit, le niveau ou le pH – en fait, presque toutes les variables physiques pouvant être représentées sous forme de signal analogique.
L’exemple ci-dessous suppose que la variable est la température, qui est la plus courante, mais les principes sont également applicables à toutes les variables analogiques.
Le schéma montre une « boucle » de régulation automatique de la température.
Il se compose d’un capteur pour mesurer la température, d’un régulateur et d’un régulateur de puissance.
Le régulateur compare la température mesurée avec la température souhaitée, appelée « point de consigne », et régule la puissance de sortie pour les rendre identiques.
La température mesurée est appelée valeur de process, ou « PV » en abrégé.
La différence entre le point de consigne et la valeur mesurée est appelée « signal d’erreur ».

Un régulateur automatique nécessite certains moyens pour mesurer la valeur de process.
Les régulateurs Eurotherm accepteront une entrée de presque n’importe quel type de capteur. La linéarisation de la valeur mesurée, si nécessaire, sera effectuée dans le régulateur.
Dans les applications de température, un thermocouple ou un thermomètre à résistance est généralement utilisé thermocouple or resistance thermometer. Le type dépendra de la plage de température et de l’environnement dans lequel il doit fonctionner.
Dans les applications où il est difficile de fixer un capteur de température fixe, la mesure de température sans contact peut être effectuée à l’aide de pyromètres infrarouges ou optiques. Les régulateurs Eurotherm prennent en charge les entrées d’une large gamme de pyromètres.
Les régulateurs Eurotherm acceptent les entrées directes des jauges de contrainte et des transducteurs de pression, de débit ou de pH.
Dans les grandes applications de contrôle de process, les conditionneurs de signal sont normalement utilisés pour convertir la mesure du capteur en un signal de 4 à 20mA ou de 0 à 10Vdc pour transmission au régulateur. Dans les régulateurs Eurotherm, il est simple de mettre ces entrées à l’échelle de la plage d’affichage souhaitée.
Un régulateur automatique nécessite certains moyens de faire varier la puissance de chauffage, ou le débit, ou la pression, du process sous contrôle.
Les principaux types de sorties sont :
Relais pour faire fonctionner un contacteur ou une électrovanne dans les applications de chauffage et de refroidissement.
Logique pour commuter un relais statique. Les avantages sont une longue durée de vie, aucun entretien et la possibilité de changer rapidement les éléments chauffants qui ont une faible masse thermique.
Triac (interrupteurs à semi-conducteurs) principalement utilisés pour faire fonctionner des électrovannes. Ils sont également idéaux pour le positionnement des vannes motorisées des brûleurs à gaz.
CC milliamps ou volts utilisés pour positionner les vannes de régulation et pour piloter les thyristors d’entrée analogiques (utilisés dans les applications d’angle de phase et de chauffage triphasé).
Il existe trois principaux types de régulation :
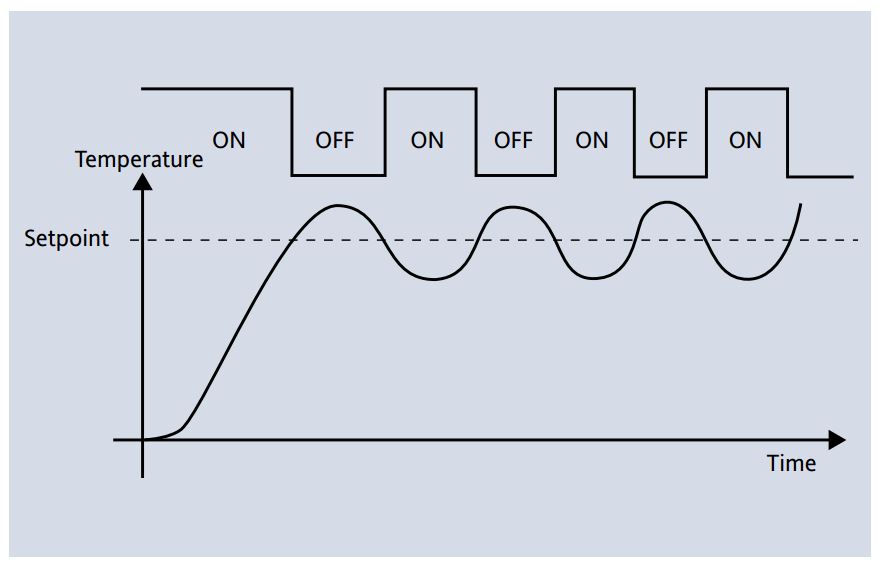
L’action de commande Marche/Arrêt est illustrée dans le graphique ci-dessous. La puissance de chauffage est soit entièrement activée lorsque la température est inférieure au point de consigne, soit entièrement désactivée lorsqu’elle est supérieure. En conséquence, la température oscille autour du point de consigne.
L’amplitude et la durée de l’oscillation sont fonction du retard thermique entre la source de chauffage et le capteur de température. Pour éviter que la sortie ne vibre lorsque la température mesurée dépasse le point de consigne, le régulateur ne s’allume pas et ne s’éteint pas exactement au même point. Au lieu de cela, un petit différentiel appelé « hystérésis » est appliqué. Une valeur typique est de 1 °C. Le régulateur Marche/Arrêt est satisfaisant pour les applications de chauffage non critiques où une certaine oscillation de la température est autorisée.
La plupart des process industriels tels que l’extrusion de plastique, le traitement des métaux ou le traitement des semi-conducteurs nécessitent une régulation stable et « en ligne droite » de la température, comme indiqué ci-dessous. Les régulateurs Eurotherm utilisent des algorithmes de régulation PID avancés pour fournir exactement cela.
La régulation PID est également appelé régulation « à trois termes ». Les trois termes sont :
P pour Proportionnelle
I pour Intégrale
D pour Dérivée
La sortie du régulateur est la somme des trois termes ci-dessus. La sortie combinée est fonction de l’amplitude et de la durée du signal d’erreur, et du taux de variation de la température ou de la valeur de procédé.


Le terme proportionnel fournit une sortie proportionnelle à la taille du signal d’erreur. Dans l’exemple ci-dessous, la bande proportionnelle est de 10°C et une erreur de 3°C produira une sortie de 30%.
Les régulateurs proportionnels uniquement ne contrôlent pas, en général, précisément au point de consigne, mais avec un décalage correspondant au point auquel la puissance de sortie est égale à la perte de chaleur du système.
Le terme intégral supprime les décalages de régulation en régime permanent en augmentant ou en diminuant la sortie proportionnellement à l’amplitude et à la durée du signal d’erreur. La vitesse de rampe (constante de temps intégrale) doit être supérieure à la constante de temps du processus pour éviter les oscillations.
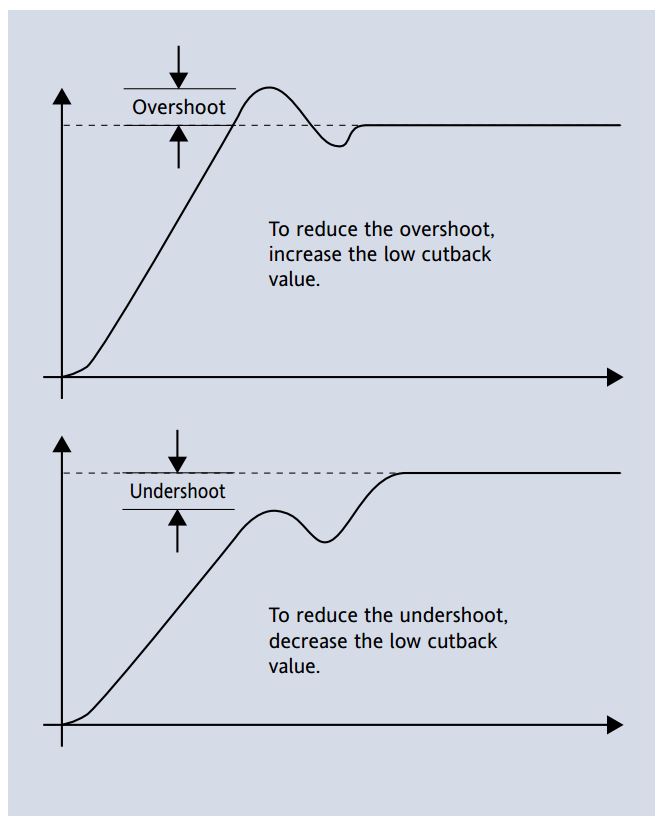
Le terme dérivé est proportionnel au taux de variation de la température ou de la valeur de procédé. Il est utilisé pour empêcher le dépassement et le sous-dépassement du point de consigne et pour rétablir rapidement la valeur de process au point de consigne en cas de changement soudain de la demande, par exemple si la porte d’un four est ouverte.
Alors que les paramètres PID sont optimisés pour une régulation en régime permanent au niveau ou à proximité du point de consigne, des paramètres de réduction haut et bas sont utilisés pour réduire le dépassement et le sous-dépassement pour les changements de température importants. Ils définissent respectivement le nombre de degrés au-dessus et en dessous du point de consigne auquel le contrôleur commencera à augmenter ou à réduire la puissance de sortie
Pour obtenir une régulation de température « en ligne droite », un régulateur PID nécessite des moyens de faire varier la puissance en douceur entre 0 et 100 %.
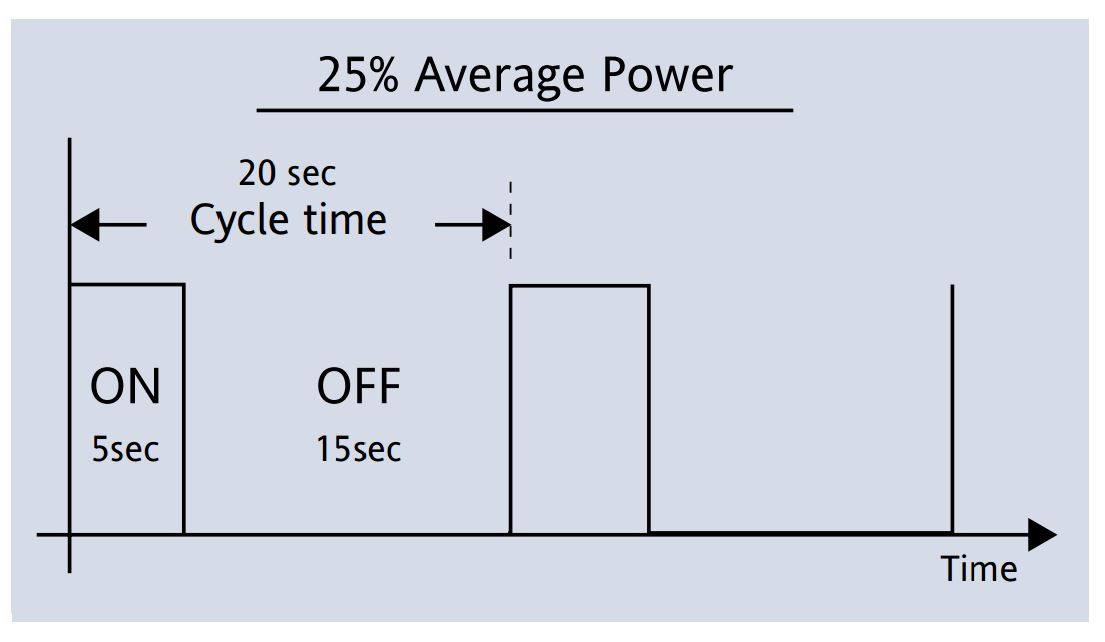
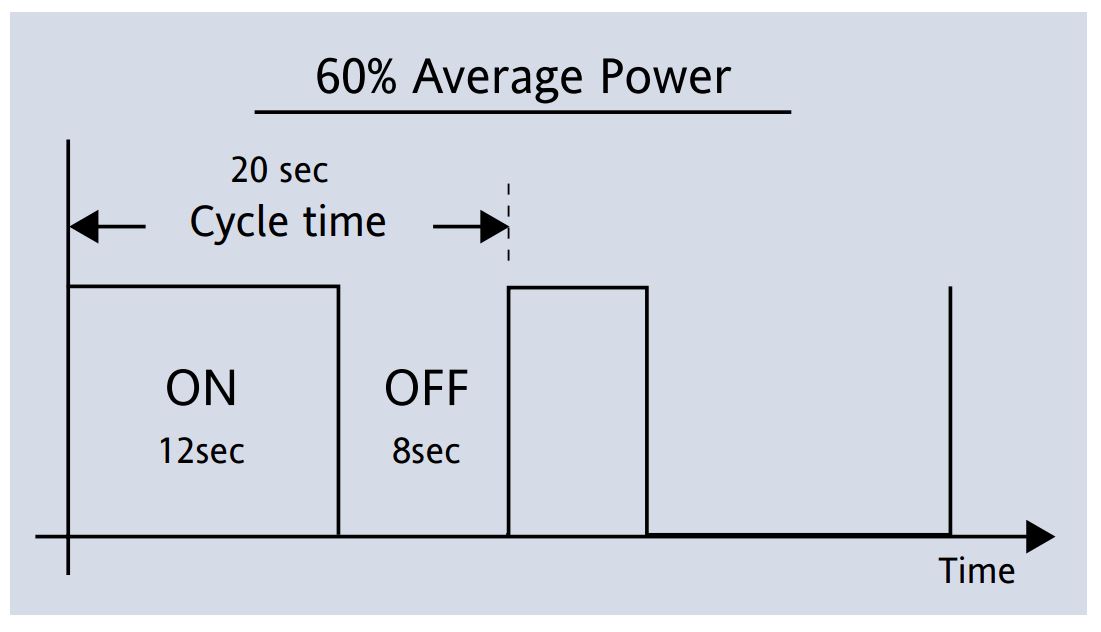
La proportionnalité temporelle fait varier le % sur le temps des sorties relais, triac et logiques pour fournir une puissance de sortie variable entre 0 et 100 %. Les graphiques ci-dessous illustrent le principe.
Le temps de cycle doit être suffisamment court pour permettre à la masse thermique de la charge de lisser les impulsions de commutation. 20 secondes est typique. Les systèmes avec une petite masse thermique auront besoin de temps de cycle plus courts que ceux qui peuvent être fournis avec un relais. Dans ces cas, un relais statique est généralement utilisé avec des temps de cycle jusqu’à 0,2 seconde.
En pratique, le temps de cycle peut ne pas être une constante, mais varier avec la demande de puissance, en particulier aux extrêmes de la plage 0-100 %.

Les vannes motorisées ont deux enroulements, un pour ouvrir la vanne et l’autre pour la fermer. La régulation est obtenue en envoyant des impulsions de montée ou de descente à l’enroulement approprié. Certaines vannes sont équipées d’un potentiomètre de rétroaction pour indiquer leur position, tandis que d’autres ne le sont pas.
Les régulateurs Eurotherm fournissent un algorithme de contrôle spécialement conçu pour être utilisé avec des vannes motorisées. Cet algorithme fonctionne aussi bien avec ou sans potentiomètre de recopie de position




Sélecteur de produits
Notre outil vous permettra de trouver le produit le mieux adapté à vos besoins.
Accéder au sélecteur de produitsNous contacter